
机器之心发布
近日,北京大学 EvoPhys 团队推出首个以 “东谈主” 为中心的 “场景级万物可控” 5D 世界模子 EvoPhys-World,基于摩尔线程寰宇产算力底座,团队初次将 AI 生成世界从 “可不雅看、可漫游,浅交互” 的阶段,鼓励到 “可控制、深交互、自进化” 的新阶段。
花式主页: https://evophys.com
智能下一站:从 “看见世界” 到 “撬动世界”
夙昔一年,世界模子成为 AI 畛域最受诊治的标的之一。以 Genie3、Lingbot-World、Marble 等为代表的一系列责任,照旧概况构建一语气、传神的假造世界,并支捏智能体在孪生出的场景中进行不雅察、推断与漫游。
但一个枢纽问题长期存在:
这些世界大多仍然只可 “看”,不成确凿 “动”。
也即是说,模子不错生成一个场景,不错让视角在场景中出动,却很难确凿合股场景中物体的物理属性,更难让 “东谈主” 或 “机器东谈主” 与物体发生允洽物理规章的交互。轻轻一推,杯子会滑走、动荡,如故翻倒?伸手一拿,物体会被成功提起,如故从手中滑落?拉开抽屉时,里面的物品会不会随着出动?按下会议室门口开关,灯光会不会随之亮起或灭火?换一个力度、角度,会不会产生不同的反馈?

“反物理” 事实推演生成
要是世界模子只可生成 “可不雅看” 的世界,那么它更像是一个视觉播放器;而要是世界模子概况合股动作、物体、战斗、因果与反馈,它才有契机成为机器东谈主和智能体的 “世界引擎”, 从 “看见世界” 到 “撬动世界”。
若何 “撬动世界”: 将范式从 3D 升维到 5D
北京大学 EvoPhys 团队提议的中枢判断是:
世界模子的施行,是对超维空间的模拟。
3D World Model 诊治的是空间中的世界:场景长什么样,物体在那里,空间结构若何组织。4D World Model 则在三维空间之上加入时候维度:世界若何随时候变化,下一刻会发生什么,夙昔、面前和改日若何结合。
但对于确凿的世界模子来说,只是看到空间和时候还不够,它还需要合股:
物体在不同平行天地下的通盘状况
不同选拔会把世界推向哪些不同改日
不同改日的预演又将若何影响当下的方案
这恰是 EvoPhys 团队进一步迈向 5D World Model 的原因。
这个模子的施行也不错借用《星际穿越》(Interstellar, 2014)中的一幕来施展。
五维超立方体空间
影片收尾,库珀参加五维超立方体空间,那里不是一个闲居房间,而是脱色个空间在时候维度上的无数切片,对于三维世界中的东谈主来说,时候只可上前流动;但在高维结构中,时候像空间相似被张开。
库珀不错沿着时候穿梭,看到儿子墨菲(Murph)房间在不同期刻的状况,而 EvoPhys-World 进一要领养的是 5D,它不单是不雅察时候线,而是要合股和主导不同世界线的 “运道”。就像库珀并不是浅易地旁不雅时候,而是通过引力向儿子传递信息,闭环了东谈主类娴雅的改日走向。
通过结果时候的弦传递信息
EvoPhys 所追求的 5D World Model,也不仅要看见世界若何演化,更要概况通过动作影响世界的演化,并在多种可能改日中选拔更优旅途。它不仅建模三维空间,也建模时候、动作、顾虑、因果与价值。它不单是复现世界的外不雅,更要合股世界的运行方式;不单是生成某一个改日,更要在多个可能改日中进行设想、评估和选拔。最终,世界模子从 3D 到 4D,再到 5D 的演进,施行上亦然 AI 从 “看见世界” 到 “推断世界”,再到 “调动世界” 的演进。
一个基模,两种形态,自主进化
EvoPhys-World 基础模子着眼于打造生成与合股一体化的新一代 5D 世界模子。
状况合股、动作合股、改日推断、耐久顾虑和计营生成长入到脱色个基础模子中,让世界模子不再只是 “生成下一帧视频”,而是具备对物理世界进行顾虑、推演、交互和方案的材干。
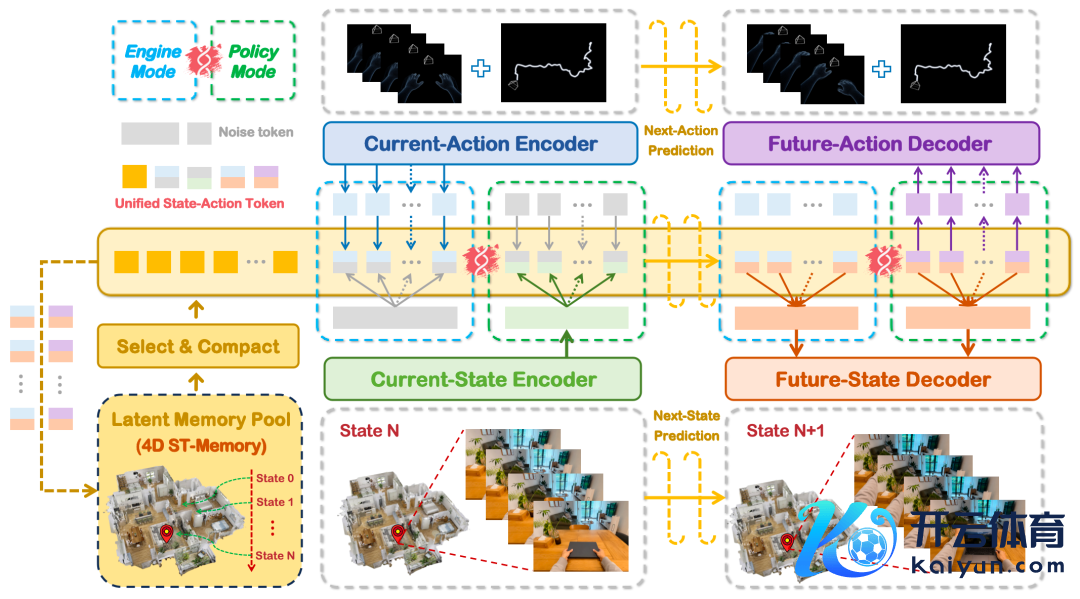
EvoPhys-World 模子架构图
最初,EvoPhys-World 以 Latent Memory Pool(4D ST-Memory)算作耐久时空顾虑池,用于保存场景在不同时间与时候状况下的隐式顾虑。模子通过期空伏击性机制,从 4D 历史顾虑中选拔并压缩枢纽隐式状况,变成算作推理时顾虑,算作后续世界推演与动作生成的中枢高下文,保证 “空间一致性” 与 “因果一致性”。
其次,EvoPhys-World 使用并行生成架构,Unified Token Chunk 输出范式,搭载立异夹杂耀眼力机制,在长入隐式状况 - 动作空间中进行 Unified State-Action Token 并行推演,原生并行完成 (1) Next-State Prediction,即推断下一时刻的世界状况,让模子概况从现时状况和动作开赴,推演场景接下来会若何变化;(2) Next-Action Prediction,即推断下一步动作,让模子不仅能合股世界若何演化,还能进一步预演智能体接下来应该若何举止。
再者,EvoPhys-World 选择 “双模式螺旋” 推理生成机制,隐空间中捏续转化推演世界状况和动作计谋,支捏小时级、场景级的未下世界交互方案与预演。
这次发布的基础模子具有两个中枢形态: (1) Model as World Engine:万物可孪生,物理可交互。(2) Model as World Policy:世界可预演,万物可操控。这两个形态共同组成了一个从 “生成世界” 到 “操控世界” 的完好意思闭环,结果 “一个基模 - 两种形态” 的自进化链路。
World Engine : 万物可孪生,物理可交互
模式 1: Model as World Engine 信息流
在 Model as World Engine 形态下,模子不错基于确凿场景构建可捏续演化的场景级世界顾虑,并生成改日设想。它不仅概况生成新场景中的淘气轨迹漫游,还概况模拟场景中淘气物体交互,并进一步支捏淘气场景出动控制的改日生成。
Demo1: 淘气场景 “淘气轨迹漫游”
掀开新闻客户端 莳植3倍带领度Head Pose 结果场景漫游 1
掀开新闻客户端 莳植3倍带领度Head Pose 结果场景漫游 2
Demo2: 淘气场景 “万古动作交互”
掀开新闻客户端 莳植3倍带领度Head Pose + Hand Pose 结果物体交互 1
掀开新闻客户端 莳植3倍带领度Head Pose + Hand Pose 结果物体交互 2
Demo3: 淘气场景 “出动控制交互”
掀开新闻客户端 莳植3倍带领度Head Pose + Hand Pose 结果出动控制 1
掀开新闻客户端 莳植3倍带领度Head Pose + Hand Pose 结果出动控制 2
这意味着,模子并不是浅易地 “看见一个世界”,而是在里面变成对于这个世界的空间顾虑和物联设想材干。
给定一个确凿场景,模子不错记着空间结构;给定一段轨迹,模子不错设想视角若何出动;给定一个手部动作,模子不错生成物体若何反馈;给定一个操作筹备,模子不错推断改日场景若何变化。
这即是 “万物可孪生” 的枢纽含义:不是对世界作念静态复制,而是构建一个不错赓续演化、不错被迫作驱动、不错被物理交互调动的动态世界副本。
World Policy : 世界可预演,万物可操控
要是说 World Engine 束缚的是 “若何孪生和设想世界”,那么 World Policy 束缚的即是 “如安活着界中举止”。
模式 2: Model as World Policy 信息流
EvoPhys 的另一个枢纽讲理,是在 Action Space 上选择了以 “东谈主” 为中心的法度动作暗示。传统具身智能系统频频以机器东谈主硬件为中心界说动作空间,EvoPhys 则选拔了一条不同的阶梯:模子学习的不是某一台机器东谈主的动作,而是 “东谈主若何与世界交互”。
具体来说,模子将第一视角下的东谈主类不雅察、头部姿态、双目视觉、手部骨骼点、手势动作以及手与物体之间的战斗相关,算作更通用的动作与交互表征。这么的 Action Space 自然对王人东谈主类合股和操控物理世界的方式,也让模子概况平直从大范围原始无标注东谈主手 EGO 数据中学习。
EvoPhys 团队使用 Unity 搭建了一个浅易的办公场景,让模子在 “法度东谈主类动作空间” (Human Action Space) 进举止作推断,模子在隐式空间进举止作 - 状况推理,解码出 “法度东谈主类动作块” (Human Action Chunk)。输入提示为 “在文献上进行盖印”,模子推断推理动作如下:
掀开新闻客户端 莳植3倍带领度模子通过生成 “东谈主类动作块” 结果东谈主手控制
在 Model as World Policy 形态下,模子进一步从 “设想世界” 走向 “操控世界”。它不错把头部姿态、手部骨骼点等东谈主类动作与感知信息,重映射到真机贤人手结果中,使假造场景中的交互材干移动到确凿机器东谈主操作任务。
掀开新闻客户端 莳植3倍带领度“东谈主类动作块” 重映射到淘气贤人抄本色
更伏击的是,这一历程不再依赖多半确凿机器东谈主汇集数据。模子概况通过孪生场景进行假造交互,再反哺确凿世界中的机器东谈主操作,从而显贵裁减具身智能数据汇集资本。这让世界模子不再只是生成模子,而驱动具备东谈主类计谋材干:它不仅概况设想改日,还概况基于改日设想选拔动作。
数据 - 模子 - 交互” 闭环,结果螺旋自进化
一体化模子 “自我进化” 信息流
比拟以往只是追求生成恶果的世界模子,EvoPhys 团队更进一步考证了完好意思闭环:数据参加模子,模子生成可交互世界,交互结果赓续反哺模子。
这变成了 “数据 — 模子 — 交互” 的闭环,也初次考证了模子基于 “万物可孪生” 和 “万物可控制” 两种形态结果螺旋自进化的可能性。
模子露馅出不同 “世界线” 推理预演材干
有利念念的是,EvoPhys-World 在固定隐式顾虑下,出现了对不同 “世界线” 的推理预演材干。模子不错阐明不同动作条款,预演多种可能的改日结果:手从不同标的接近纸杯、选拔不同筹备、推动或翻转物体,并推断桌面状况若何变化、杯中物品的位置相关。
掀开新闻客户端 莳植3倍带领度不同交互可能性的 “因果预演”
这施展模子不是浅易生成固定视频轨迹,而是在合股场景、动作与物理交互后,通过因果推演不同 “世界线”。
脱色个 “面前”,因为不同 “动作” 走向不同 “改日”。
这种材干恰是 5D World Model 的枢纽体现:模子不仅能记着世界,也能设想世界;不仅能推断下一描述面,更能围绕动作、物体和物理交互,预演多条可能的世界线。
为什么这是 “以东谈主为中心” 的世界模子?
EvoPhys 所提议的世界模子,并不是浅易地模拟一个静态世界,而是围绕 “东谈主” 与世界的交互来建模。
它诊治的是:
“东谈主” 若何不雅察世界;
“东谈主” 若何顾虑场景;
“东谈主” 若何用手与物体交互;
“东谈主” 若何阐明物体反馈调治动作;
“东谈主” 如安在动态环境中变成操办和方案。
因此,这一模子不是地谈的视觉生成模子,也不是单一的机器东谈主结果模子,而是一个以东谈主类表示和交互方式为中枢的场景级世界模子。
它试图修起一个更底层的问题:AI 要确凿合股物理世界,是否必须先合股东谈主如安活着界中举止?
北大 EvoPhys 团队给出的谜底是:是的!
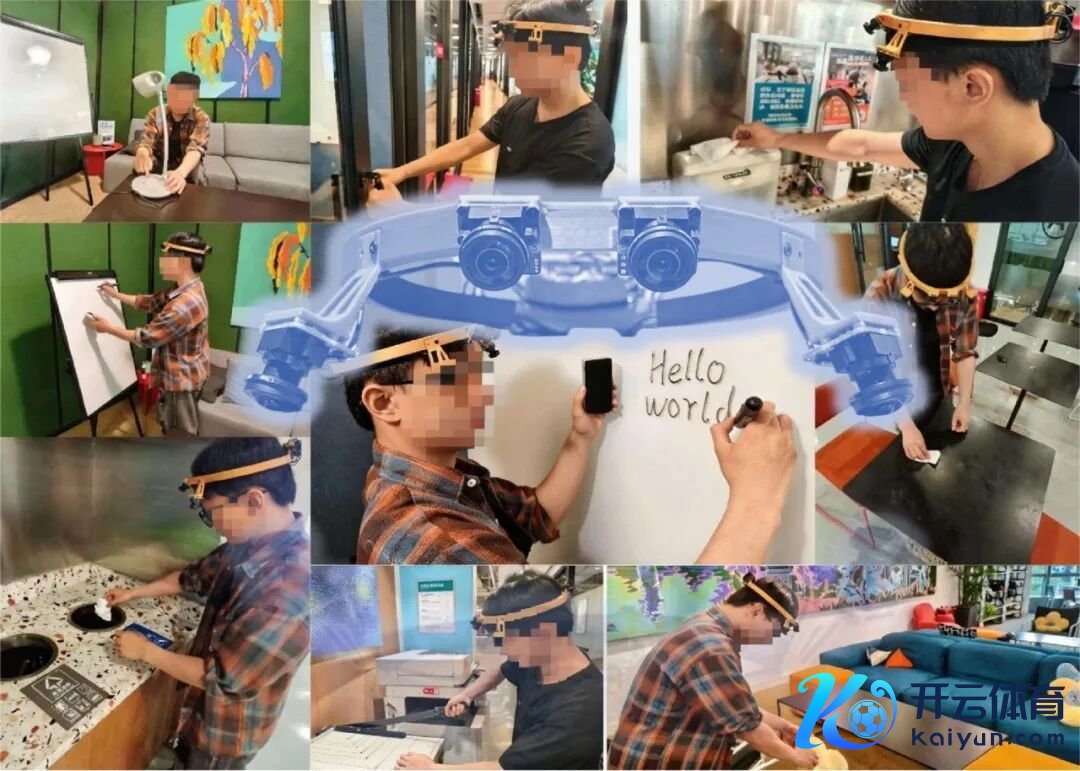
EvoPhys 数采 - 遥操 - 机器东谈主三位一体传感器模组
掀开新闻客户端 莳植3倍带领度EvoPhys 以东谈主为中心的数据管线
因为机器东谈主并不像汽车相似即使莫得自动驾驶也照旧走进千门万户,是以基于真机数据构建具身世界模子的方式注定不法度、高资本、难拓展,而东谈主类相对是法度的,东谈主类才是阿谁大范围部署在社会出产中的 “通用机器东谈主”,东谈主类对物理世界的表示简直都来自于第一东谈主称的感受、操作与交互体验之中,是以统共物理 Ai 的启动最伏击的即是大范围东谈主类数据。通过将 action space 对王人到东谈主的法度动作暗示,并运用原始无标注东谈主手 EGO 数据,EvoPhys 让世界模子第一次具备了从 “东谈主的交互教导” 中学习世界规章的材干。
国产 GPU 算力助力 “世界模子” 前沿探索
值得一提的是,本次 EvoPhys-World 的考察与研发探索,得到了摩尔线程寰宇产 GPU 本领栈的算力相沿。面向 4 万小时纯东谈主手 EGO 数据,EvoPhys-World 需要在万古序第一视角交互数据中同期建模时空顾虑、状况推断、动作推断、物理交互与计谋演化,对考察安祥性、数据微辞和软硬件协同着力提议了极高要求。摩尔线程基于寰宇产算力平台,为这一以 “东谈主” 为中心的场景级万物可控世界模子提供了枢纽算力底座,通过国产软硬件深度协同,相沿模子在 “万物可孪生” 与 “万物可交互” 两种形态上的捏续演进。改日,摩尔线程也将与高校及产业伙伴通盘,推动具身智能中枢本领讲理与产业高质料发展。
结语
世界模子的下一站,是可结果、可交互、可进化
世界模子的竞争正在从 “谁生成得更传神”,走向 “谁更懂物理、谁更会交互、谁能自我进化”。北大 EvoPhys 团队这次推出的以 “东谈主” 为中心的 “场景级万物可控” 世界模子,给出了一个新的谜底:世界不应只是被 AI 看见,也应该被 AI 合股、操控和调动。
从 “万物可孪生” 到 “万物可控制” 到 “自我进化”,从 “原始无标注东谈主手 EGO 数据” 到 “数据 - 模子 - 交互” 闭环,从 “东谈主的法度动作” 暗示到 “具身任务考证”,这项责任正在把世界模子推向一个更接近物理现实、更接近东谈主类交互、更接近通用智能的新阶段。
© THE END
转载请关联本公众号取得授权
投稿或寻求报谈:liyazhou@jiqizhixin.com开云体育(中国)官方网站